คุณรู้หรือไม่ว่า GPS ประกอบด้วยดาวเทียม 24 ดวง? ในบทความนี้เราจะแสดงให้คุณเห็น ประวัติของจีพีเอสตลอดจนวิวัฒนาการจากการสร้างจนถึงปัจจุบัน

ประวัติ GPS
GPS, Global Positioning System ซึ่งมีชื่อเดิมว่า Navstar GPS: เป็นวิธีการที่พยายามระบุตำแหน่งบนโลกของบุคคลหรือรถยนต์ใดๆ อย่างแม่นยำ
ระบบนี้ถูกสร้างขึ้นโดยกระทรวงกลาโหมของสหรัฐอเมริกา ปัจจุบันเป็นของกองทัพอวกาศสหรัฐ เพื่อให้ได้ตำแหน่งที่ต้องการ ระบบนำทางใช้ดาวเทียมตั้งแต่สี่ดวงขึ้นไป
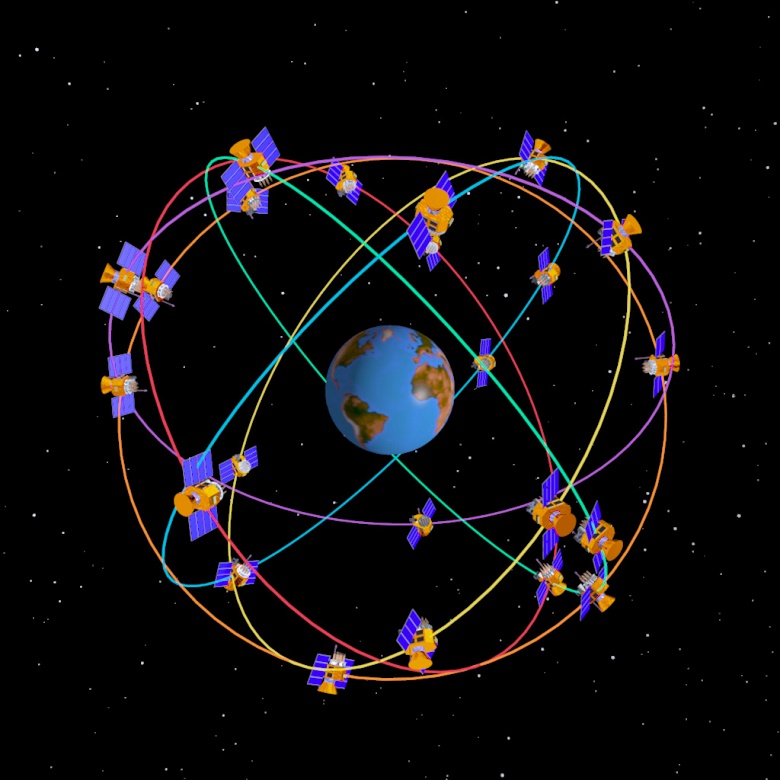
สำหรับการใช้งาน GPS ต้องการดาวเทียมอย่างน้อย 24 ดวงโดยประมาณในวงโคจรเหนือพื้นโลก ที่ระดับความสูงประมาณ 20000 กิโลเมตร มันกระจายวงโคจรของมันในลักษณะที่สามารถมีดาวเทียมสี่ดวงที่ระบุอยู่ในโลกทั้งใบ
ในช่วงทศวรรษ 1960 ระบบ OMEGA หรือที่รู้จักในชื่อ Terrestrial Navigation System ซึ่งอิงจากสัญญาณที่ได้รับจากสถานีภาคพื้นดินสองสามแห่ง สามารถครองตำแหน่งแรกในระบบนำทางด้วยวิทยุของโลกได้ อย่างไรก็ตาม เนื่องจากระบบเหล่านี้มีข้อจำกัดบางประการ พวกเขาจึงเห็นความจำเป็นในการแสวงหาการตอบสนองมากขึ้นในการนำทางที่แม่นยำยิ่งขึ้น จึงเป็นจุดเริ่มต้นของประวัติศาสตร์ของ GPS
กองทัพสหรัฐใช้ประโยชน์จากความก้าวหน้าในการนำทางเหล่านี้ในประวัติศาสตร์ของ gps โดยใช้ดาวเทียมที่ทำให้เห็นภาพตำแหน่งที่แน่นอนและตรงต่อเวลา

ระบบที่ใช้ต้องเป็นไปตามข้อกำหนดบางประการเพื่อดำเนินการ มีความเป็นสากล ในกรณีนี้โลกจะต้องถูกห้อมล้อมอย่างสมบูรณ์ ขัดขืน และงานของเขาจะต้องต่อเนื่องโดยไม่ถูกรบกวนหรือถูกจำกัดโดยสภาวะบรรยากาศ รวมถึงการกระฉับกระเฉงเพื่อให้แม่นยำ
ในปีพ.ศ. 1964 ระบบใหม่ชื่อ Transit ได้เริ่มดำเนินการ และในปี พ.ศ. 1967 กองทัพได้นำระบบนี้ไปใช้ในเชิงพาณิชย์
ระบบนี้มีโครงสร้างโดยดาวเทียมโคจรรอบขั้วต่ำจำนวน 1074 ดวง ที่ระดับความสูง 15 กม. พวกเขาอนุญาตให้มีการครอบคลุมทั่วโลก แต่ไม่ถาวร ความเป็นไปได้ของตำแหน่งไม่คงที่ เข้าถึงดาวเทียมได้ทุกๆ สองชั่วโมงโดยประมาณ ในการคำนวณตำแหน่งของมัน จะต้องมีการตรวจสอบทุกๆ XNUMX นาทีเพื่อป้องกันไม่ให้สูญเสียระยะ
กองทัพเรือสหรัฐฯ ในปี 1967 ได้พัฒนาดาวเทียมชื่อ Timation แสดงให้เห็นความเป็นไปได้ที่แน่ชัดในการวางนาฬิกาที่แน่นอนในอวกาศ ซึ่งจะให้ข้อมูลที่สม่ำเสมอ ซึ่งเป็นความก้าวหน้าที่ประสานกับ GPS
ในปีพ.ศ. 1973 โครงการต่างๆ ที่กองทัพเรือสหรัฐฯ และกองทัพอากาศได้ร่วมกันทำงาน และได้มีการเปิดตัวโครงการเทคโนโลยีการนำทางที่เรียกว่า ซึ่งหมายถึงโครงการเทคโนโลยีการนำทาง
ตั้งแต่ปีพ.ศ. 1978 ถึง พ.ศ. 1985 พวกเขาได้เปิดเผยและมีดาวเทียมทดลอง Navstar แปดดวง หลังจากนั้น คนรุ่นใหม่ก็ปรากฏตัวขึ้น จนกระทั่งถึงกลุ่มดาวที่ปัจจุบันรู้จักในชื่อความสามารถในการปฏิบัติการเริ่มต้น ซึ่งระบุในเดือนธันวาคม พ.ศ. 1993 โดยมีจำนวนความจุทั้งหมดและมีประโยชน์ภายในปี พ.ศ. 1995
ในปี 2009 สหรัฐอเมริกาได้พัฒนาบริการที่อนุญาตให้จัดตั้งตำแหน่งและช่วยเหลือ ICAO ซึ่งไม่ปฏิเสธที่จะยอมรับข้อเสนอ ดังนั้นประวัติของ gps จึงเกิดขึ้นทีละเล็กทีละน้อย
ลักษณะและรูปแบบที่พัฒนาขึ้นในประวัติศาสตร์ของ gps
- มีดาวเทียม 24 กลุ่มดาวซึ่งแสดงระหว่าง 4 ถึง 6 โคจร
- มีระดับความสูง 20200 กม.
- คาบของมันอยู่ระหว่าง 12 ชั่วโมงดาวฤกษ์
- มีความเอียงประมาณ 55 °
- ให้ชีวิตที่ดี 8 ปี
- ความครอบคลุมของมันคือทั่วโลก
- ความจุของผู้ใช้ไม่มีขีดจำกัด
- ภายในระบบพิกัดของมันใช้งานได้กับ 8000
สัญญาณในประวัติ gps
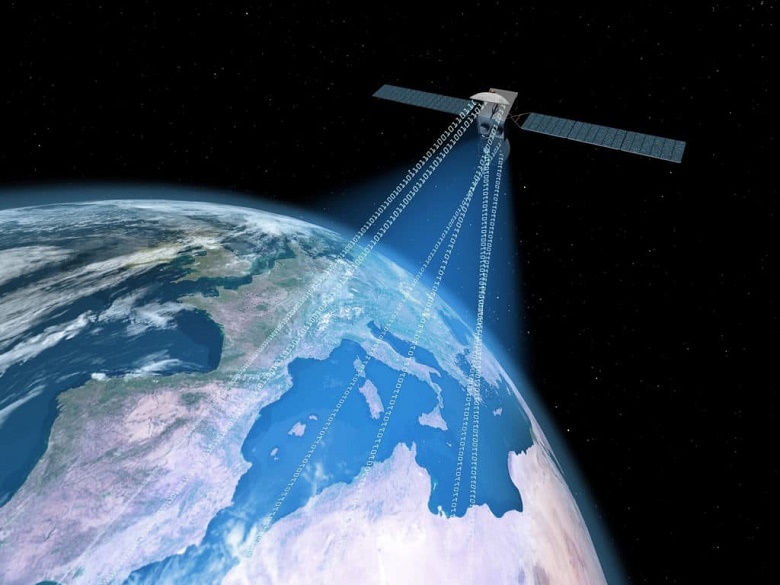
ภายในประวัติของ GPS เราพบว่ามีการส่งข้อความการนำทางอย่างต่อเนื่องที่ความเร็วประมาณ 50 บิตต่อวินาทีในโครงสร้างการถ่ายโอนไมโครเวฟ 1600 MHz สำหรับวิทยุ FM จะส่งระหว่าง 86 ถึง 109 MHz และสำหรับ Wi-Fi จะใช้งานได้ประมาณ 5000 MHz และ 2500 MHz ดาวเทียมโดยรวมส่ง 1600 MHz สำหรับสัญญาณ L1 และ 1228 สำหรับสัญญาณ L2
สัญญาณ GPS นี้แสดงเวลา เวลาที่เกี่ยวข้องกับแต่ละสัปดาห์ โดยใช้นาฬิกาอะตอมที่อยู่ภายในดาวเทียม นอกจากนี้ยังแสดงจำนวนของแต่ละสัปดาห์ และออกแบบข้อมูลอ้างอิงที่ช่วยให้คุณค้นพบว่าดาวเทียมมีข้อผิดพลาดหรือไม่
การออกอากาศมีความยาว 30 วินาทีพร้อมข้อมูล 1500 บิต ตัวเลขข้อมูลกำหนดขึ้นโดยการติดตามสุ่มหลอกด้วยความเร็วสูงซึ่งระบุลักษณะของดาวเทียมแต่ละดวง
การปล่อยก๊าซหมดเวลา เริ่มต้นและสิ้นสุดพร้อมกันตามนาฬิกาในดาวเทียม ในตอนแรก เครื่องรับข้อมูลจะได้รับแจ้งถึงความเชื่อมโยงที่มีอยู่ระหว่างนาฬิกาดาวเทียมกับเวลาที่ GPS ระบุ และในช่วงเวลาที่สอง เครื่องจะส่งข้อมูลไปยังเครื่องส่งสัญญาณของวงโคจรที่แน่นอนของดาวเทียม
ระบบ gps วิวัฒนาการทาง
- มีการเพิ่มสัญญาณใหม่สำหรับการใช้งานทางแพ่งใน L1
- ในทำนองเดียวกัน สัญญาณแพ่งใหม่จะถูกเพิ่มลงใน L5 ด้วยความเร็วประมาณ 1177 MHz
- นอกจากนี้ยังมีการกำหนดรูปแบบการดูแลสำหรับสัญญาณใหม่ของบริการรักษาความปลอดภัยเพื่อชีวิต
- ให้การกระจายสัญญาณที่ดีขึ้น
- ปรับปรุงความแรงของสัญญาณ
- มีการเพิ่มขึ้นในกล่องตรวจสอบ พวกเขาเพิ่มขึ้นเป็น 12
- เข้าถึงความสัมพันธ์ด้วยคอนตินิวอัม L1 ของกาลิเลโอ
- ตอบโจทย์สายลูกค้าไม่ว่าจะเป็นทหารหรือพลเรือนในการใช้งาน gps
- กำหนดคำขอ gps III ตามรูปแบบการทำงาน
- ช่วยอำนวยความสะดวกในการอนุญาตที่จำเป็นในการเปลี่ยนแปลงในอนาคต เพื่อตอบสนองคำขอที่ผู้ใช้เต็มใจจะทำจนถึงปี 2030
ระบบนี้ได้รับความก้าวหน้าอย่างมากซึ่งทำให้สามารถสร้างตำแหน่งในขอบเขตของข้อมูลได้อย่างจริงจัง ซึ่งช่วยให้ลูกค้าระบุการเคลื่อนไหวของ Mobile Mapping ที่มีชื่อเสียงได้อย่างแม่นยำ
ด้วยวิธีนี้ การทำแผนที่ 3 มิติ จะถูกใช้ผ่านเครื่องสแกนที่มีเลเซอร์ การวัดของกล้อง เซ็นเซอร์ ระบบ gnss ทำให้สามารถระบุได้อย่างแม่นยำ จับมือกับเทคโนโลยีตำแหน่งทั้งสาม: IMU, GNSS และ Odometer ใคร พวกเขาบรรลุช่วงสัญญาณแม้ในสถานที่ที่ไม่ดี
gps ทำงานอย่างไร
ประวัติของ gps ได้แสดงให้เห็นความก้าวหน้าอย่างมากภายในพวกเขาฟังก์ชั่นของพวกเขาได้รับการปรับปรุงในหมู่พวกเขามันคุ้มค่าที่จะเน้น:
- ภายในฟังก์ชัน GPS จะทำเครื่องหมายรูปแบบที่เรียกว่า ephemeris ซึ่งเป็นสาเหตุที่ทำให้แต่ละเครื่องส่งข้อมูลของตนเองทีละรายการ ซึ่งกำหนดอายุของดาวเทียม มันเป็นอย่างไรในอวกาศ เวลาของมัน เนื้อหาดอปเปลอร์ และอื่นๆ
- ดาวเทียมที่แยกจากกันแสดงว่าผู้รับผิดชอบในการรับข้อมูลนั้นตั้งอยู่ในพื้นที่เฉพาะบนพื้นผิวของทรงกลม ทิศเหนือของมันคือดาวเทียมดวงเดียวกัน และวิทยุของมันคือระยะทางที่แน่นอนไปยังเครื่องรับ
- เมื่อได้รับข้อมูลที่ปล่อยออกมาจากดาวเทียมสองดวงแล้ว สามารถสร้างรูปร่างขึ้นได้ซึ่งเป็นผลมาจากทรงกลมสองอันในพื้นที่เฉพาะบางแห่งซึ่งเครื่องรับตั้งอยู่
- เมื่อได้รับข้อมูลจากดาวเทียมหมายเลขสาม ความผิดปกติที่ป้องกันนาฬิกาไม่ให้สัมพันธ์กันและผู้รับประโยชน์จาก GPS จะหายไป ทำให้ได้ตำแหน่ง 3D ที่แม่นยำ
หากคุณต้องการเสริมสร้างตัวเองด้วยหัวข้อเทคโนโลยีอื่น ๆ ฉันขอเชิญคุณไปที่ลิงค์ เทคโนโลยีดาวเทียม

ความน่าเชื่อถือของข้อมูลที่ปล่อยออกมาจาก gps
เนื่องจาก GPS มีสายการทหาร ในสหรัฐอเมริกา กระทรวงกลาโหมจึงรักษาความน่าจะเป็นที่จะสุ่มเลือกขนาดเล็ก ซึ่งสามารถปรับเปลี่ยนได้ระหว่าง 15 ถึง 100 ม. อย่างไรก็ตาม ในปัจจุบันข้อผิดพลาดที่เกิดจากสาเหตุนี้ไม่ได้ถูกนำมาใช้ ข้อมูลที่ส่งโดย GPS ที่แม่นยำและแม่นยำนั้นสัมพันธ์กับจำนวนดาวเทียมที่สามารถสังเกตได้ในเวลาที่กำหนด
หากข้อมูลที่ได้รับอยู่ระหว่างเจ็ดถึงเก้าดาวเทียมและไม่สอดคล้องกัน ค่าที่วัดได้อยู่ด้านล่าง อาจเป็นระหว่าง 2 เมตรใน 95% ของเวลาทั้งหมด หากใช้ระบบ GDPS ตรงกันข้าม ความแม่นยำในการวัดจะมาก ดีกว่าเพราะเป็นตัวแทนของสถานการณ์ 97%
ความน่าเชื่อถือของข้อมูลที่ GPS ให้นั้นขึ้นอยู่กับรูปแบบของตำแหน่ง เพื่อวัดตำแหน่งของเครื่องรับอย่างแม่นยำและแม่นยำ
อย่างที่เราเห็น มีความก้าวหน้ามากมายที่เกิดขึ้นในประวัติศาสตร์ของ GPS
ที่มาของข้อผิดพลาด gps ในประวัติของคุณ
ข้อมูลที่ gps วัดต้องการในขณะนี้ ตำแหน่งของดาวเทียม และความล่าช้าของสัญญาณที่ได้รับ ความแม่นยำเกิดจากความแม่นยำของตำแหน่งและความล่าช้าของสัญญาณ
เมื่อตรวจพบความล่าช้า บุคคลที่รับผิดชอบในการรับข้อมูลจะเกี่ยวข้องกับจำนวนบิตที่ส่งโดยดาวเทียมพร้อมการตีความส่วนบุคคล เมื่อเงื่อนไขของซีรีส์มีความสัมพันธ์กัน ส่วนประกอบอิเล็กทรอนิกส์จะสร้างความไม่เท่าเทียมกัน 1% ในเวลาเล็กน้อย ดังนั้นสัญญาณที่ปล่อยออกมาจาก gps จะขยายด้วยความเร็วแสง ซึ่งสร้างความผิดปกติประมาณสามเมตร ถือว่าเป็นความผิดปกติเล็กน้อยเมื่อใช้สัญญาณ gps
ความแม่นยำสามารถปรับปรุงได้โดยใช้สัญญาณ P(Y) ซึ่งแสดงผลเดียวกันซึ่งคิดเป็น 1% ของเวลา สัญญาณ P(Y) ที่มีประสิทธิภาพสูงแสดงข้อสรุปที่แม่นยำประมาณ 30 เซนติเมตร
ความแม่นยำของการวัด gps นั้นได้รับอิทธิพลจากความผิดปกติที่เกิดขึ้นจากอุปกรณ์อิเล็กทรอนิกส์ วิธีการวัดเหล่านี้สามารถปรับปรุงได้ด้วยการใช้ซอฟต์แวร์และวิธีการที่ใช้ในแบบเรียลไทม์
หากคุณต้องการทราบเกี่ยวกับวิวัฒนาการของ GPS ผมขอเชิญคุณชมเนื้อหาภาพและเสียงต่อไปนี้
ภายในขอบของข้อผิดพลาดในประวัติของ gps เราสามารถพิจารณา:
- ความล่าช้าในการปล่อยสัญญาณในบรรยากาศรอบนอกและชั้นโทรโพสเฟียร์
- สัญญาณที่ใช้ร่วมกันในเวลาเดียวกันในอาคารและภูเขาและจะถูกส่งกลับ
- ความผิดพลาดในวงโคจรโดยที่ข้อมูลของสิ่งเดียวกันไม่แน่นอน
- จำนวนดาวเทียมที่สังเกตได้
- ความไม่เท่าเทียมกันในตำแหน่งของดาวเทียมที่สามารถดูได้
- ข้อผิดพลาดในนาฬิกา gps ภายใน
องค์ประกอบที่แทรกแซงข้อผิดพลาดของข้อมูลที่ปล่อยออกมา
องค์ประกอบที่เกี่ยวข้องกับข้อผิดพลาดที่เกิดขึ้นในประวัติศาสตร์ของ gps เกี่ยวข้องกับ:
ข้อผิดพลาดดาวเทียมที่ไม่ซ้ำในประวัติ gps
- ข้อผิดพลาดในวงโคจร: องค์ประกอบที่เพียงพอจำเป็นต่อการขับเคลื่อนวงโคจร เนื่องจากดาวเทียมไม่มีเส้นตรงไปยังวงโคจร Kleperian ซึ่งถือว่าเป็นเรื่องปกติ จึงส่งผลให้กระบวนการหยุดชะงักเนื่องจากขาดความรู้ พลังงานที่มีอิทธิพลต่อดาวเทียมแต่ละดวง
- ความผิดปกติในนาฬิกาภายใน: มันเกี่ยวข้องกับการเปลี่ยนแปลงในเวลาของนาฬิกาภายในที่เกิดจากการสูญเสียของออสซิลเลเตอร์และที่เกิดจากการเคลื่อนที่ของผลกระทบสัมพัทธ์ ซึ่งทำให้เกิดความแตกต่างอย่างมากระหว่าง เวลาที่กำหนดและดาวเทียม
- ข้อผิดพลาดของตำแหน่ง: การขาดการรักษาความปลอดภัยที่เกิดขึ้นจากตำแหน่งโดยอนุมานจากการขาดความแม่นยำของตำแหน่งและดาวเทียมที่เลือก
ข้อผิดพลาดในรูปแบบของการส่งสัญญาณในประวัติของ gps
- ข้อบกพร่องในการเสริมแรงไอโอโนสเฟียร์: เกี่ยวข้องกับความถี่ GPS ข้อผิดพลาดในการเสริมแรงปรากฏขึ้นจาก 50 เมตรถึง 1 เมตร ความแรงของไอโอโนสเฟียร์ขึ้นอยู่กับความสม่ำเสมอและผลโดยประมาณของการวัดแต่ละครั้งที่ทำ
- ข้อผิดพลาดในการเสริมแรงแบบชั้นทรอโพสเฟียร์: ข้อผิดพลาดเหล่านี้ทำเครื่องหมายระยะขอบระหว่าง 2 ถึง 25 เมตร ซึ่งแยกออกจากความสม่ำเสมอของการวัด อย่างไรก็ตาม ข้อผิดพลาดนี้สามารถแก้ไขได้โดยใช้โมเดลโทรโพสเฟียร์อื่นๆ
- Multipath: วิธีนี้ทำให้สัญญาณมาถึงโดยใช้แหล่งสัญญาณที่แตกต่างกันสองแหล่ง แม้ว่าสิ่งนี้จะทำให้สัญญาณถูกขัดจังหวะ เมื่อวัดพื้นผิวจะสังเกตเห็นการใช้ Multipath เพื่อประเมินรูปร่างของมันต่ำไป สามารถใช้เสาอากาศที่ทำงานร่วมกับสัญญาณที่ได้รับจากสภาพแวดล้อมต่างๆ ได้
ข้อผิดพลาดที่เกี่ยวข้องโดยตรงกับการรับข้อมูลในประวัติ gps
- เสียง: สัญญาณรบกวนเกี่ยวข้องกับปริมาณข้อมูลและเวลาที่จำเป็นเพื่อให้ได้มาอย่างถูกต้อง ซึ่งต้องปฏิบัติตามเพื่อให้ได้การวัดที่แม่นยำ
- ศูนย์ข้อมูลเสาอากาศ: หากพบข้อผิดพลาดที่ทราบแล้วในบทบาทของเสาอากาศในการวัด จุดจะถูกยกเลิก เมื่อการวัดถูกต้อง เสาอากาศจะจัดแนวไปในทิศทางเดียวกันเพื่อให้ได้ผลลัพธ์ที่ต้องการ

การรวม gps เข้ากับโทรศัพท์มือถือ
ปัจจุบันการใช้ gps ในโทรศัพท์ได้รับความนิยมอย่างมาก ได้มีการนำเข้าสู่สมาร์ทโฟน ซึ่งมีประโยชน์มากในการขอที่อยู่ การใช้ gps ได้ก่อให้เกิดวิธีซอฟต์แวร์สำหรับประเภทและรุ่นต่างๆ ตลอดจนธุรกิจประเภทต่างๆ ที่ต้องใช้โทรศัพท์มือถือ
มันทำให้เรามีความเป็นไปได้ที่จะรู้จักสถานที่ที่เพื่อนและครอบครัวอยู่ผ่านแผนที่ จำเป็นต้องมีแพลตฟอร์มที่จำเป็นเท่านั้น
การรวม GPS ในนาฬิกา
ความก้าวหน้าของเทคโนโลยีในปัจจุบันทำให้สามารถหลีกทางให้สมาร์ทวอทช์ที่มี GPS รวมอยู่ด้วย สามารถใช้กับสมาร์ทโฟนได้หากเราอ้างอิงถึงนาฬิกาสปอร์ตหรือสร้อยข้อมือที่ไม่มีหน้าจอ
เช่นเดียวกับสมาร์ทโฟน สิ่งนี้ช่วยให้เราทราบตำแหน่งของผู้คนที่เราต้องการ จำเป็นต้องมีแอปพลิเคชั่นและแพลตฟอร์มที่จำเป็นเท่านั้น

ทฤษฎีสัมพัทธภาพและ GPS
ในดาวเทียม GPS นาฬิกาจะต้องสัมพันธ์กับตำแหน่งบนพื้นดิน ดังนั้นจึงต้องพิจารณาทฤษฎีสัมพัทธภาพทั่วไปและพิเศษ ผลกระทบที่เกิดขึ้น ได้แก่ เวลา ความถี่ที่เปลี่ยนแปลง และความเยื้องศูนย์
ในทางกลับกัน ในแง่ของเวลาที่ความเร็วของดาวเทียมแกว่งไปมาระหว่าง 1 ส่วนใน 10 การขยายนี้ส่งผลให้นาฬิกาดาวเทียมเร็วขึ้นประมาณ 5 ส่วนใน 10
เกี่ยวกับทฤษฎีสัมพัทธภาพเชิงพื้นที่และทั่วไป เริ่มจากทฤษฎีสัมพัทธภาพ เพราะมันเคลื่อนที่ตลอดเวลาและความสูงที่แสดง ส่งผลต่อความเร็วของนาฬิกา ทฤษฎีสัมพัทธภาพทั่วไประบุว่านาฬิกาที่อยู่ใกล้สิ่งที่ต้องการวัดจะช้ากว่าหนึ่งมาก ที่อยู่ห่างออกไป หากเราเชื่อมโยงโดยตรงกับ gps สิ่งที่คุณต้องการรับข้อมูลนั้นอยู่ใกล้โลกมากกว่าดาวเทียม
การใช้ gps ได้กลายเป็นเครื่องมือที่ยอดเยี่ยมทั้งในด้านความสัมพันธ์และการทำงาน ด้วยเหตุนี้จึงจำเป็นต้องรู้ว่ามันทำงานอย่างไรจากต้นกำเนิดเพื่อทราบขอบเขตและใช้ประโยชน์สูงสุดจากมัน